https://medium.com/@epabrego/1-micropython-esp32-max31865-rtd-pt100-9e9c02e2b55d
Muchas veces se necesita un termómetro que brinde muchas posibilidades de configuración, en esta oportunidad vamos a realizar uno que permite un amplio espectro de utilidades, el mismo lo hice para medicion de un horno por lo que era necesario utilizar puntas de medición que soporten altas temperaturas. Aqui recurrimos a utilizar una RTD (del inglés: resistance temperature detector) es un detector de temperatura y que existen de varios materiales pero las mas comunes son las de Platino (Pt).
Materiales:
- (1) MAX31865
- (1) RTD PT100 3Wires
- (1) ESP32
Diagrama de conexiones:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
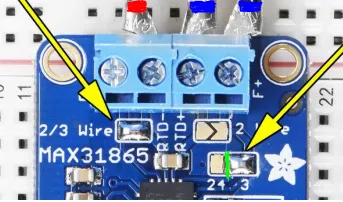
MAX31865 - ESP32 VIN - 3V3 GND - GND 3V3 - CLK - VSPI_CLK (GPIO18) SDO - VSPI_MISO (GPIO19) SDI - VSPI_MOSI (GPIO23) CS - VSPI_SS (GPIO5) RDY - PT100 3Wire - MAX31865 WBlue - F+ WBlue - RTD+ WRed - RTD- - F- Nota: WBlue <- ~102Ω -> WRed WBlue <- ~2Ω -> WBlue Cortar unión entre contacto 24-3 sobre Rref |
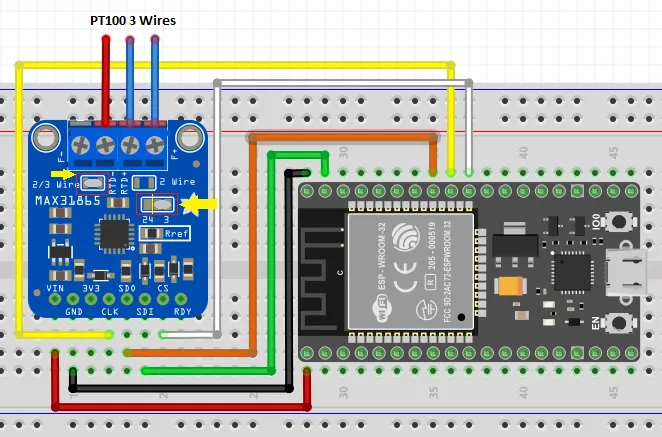
Tendrá que cortar el delgado puente (marcado en verde) en el lado derecho del tablero y luego soldar; también soldar el punte marcado (2/3 Wire) o unir los terminales (F-) (RTD-) con un alambre.
Micropython — Código
Estructura
|
1 2 3 4 5 6 |
main.py lib -adafruit_max31865.py -spi_device.py |
main.py
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 |
## MicroPython Imports import time import machine ## Local Imports import adafruit_max31865 as max31865 RTD_NOMINAL = 100.0 ## Resistance of RTD at 0C RTD_REFERENCE = 430.0 ## Value of reference resistor on PCB RTD_WIRES = 3 ## RTD 3 wires ## Create Software SPI controller. MAX31865 requires polarity of 0 and phase of 1. ## Currently, the micropython on the ESP32 does not support hardware SPI sck = machine.Pin(18, machine.Pin.OUT) mosi = machine.Pin(23, machine.Pin.IN) miso = machine.Pin(19, machine.Pin.OUT) spi = machine.SPI(baudrate=50000, sck=sck, mosi=mosi, miso=miso, polarity=0, phase=1) ## Create array SPI Chip Select pins #cs1 = machine.Pin(33, machine.Pin.OUT, value=1) #cs2 = machine.Pin(15, machine.Pin.OUT, value=1) #cs3 = machine.Pin(32, machine.Pin.OUT, value=1) #cs4 = machine.Pin(14, machine.Pin.OUT, value=1) #css = [cs1, cs2, cs3, cs4] cs1 = machine.Pin(5, machine.Pin.OUT, value=1) css = [cs1] sensors = [] idx = 0 ## Create array of active RTD sensors and information about them for cs in css: idx += 1 sensors.append( max31865.MAX31865( spi, css[idx-1], wires = RTD_WIRES, rtd_nominal = RTD_NOMINAL, ref_resistor = RTD_REFERENCE) ) def timestamp(): return float(time.ticks_ms()) / 1000.0 boot_time = timestamp() while True: data = [timestamp() - boot_time] + [sensor.temperature for sensor in sensors] print(','.join(map(str,data))) |
adafruit_max31865.py
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 |
# # Copyright (c) 2017 Tony DiCola for Adafruit Industries # # Permission is hereby granted, free of charge, to any person obtaining a copy # of this software and associated documentation files (the "Software"), to deal # in the Software without restriction, including without limitation the rights # to use, copy, modify, merge, publish, distribute, sublicense, and/or sell # copies of the Software, and to permit persons to whom the Software is # furnished to do so, subject to the following conditions: # # The above copyright notice and this permission notice shall be included in # all copies or substantial portions of the Software. # # THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR # IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, # FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE # AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER # LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, # OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN # THE SOFTWARE. """ `adafruit_max31865` ==================================================== MicroPython module for the MAX31865 platinum RTD temperature sensor. See examples/simpletest.py for an example of the usage. * Author(s): Tony DiCola, original CircuitPython version Chris Osterwood, port _read and _write methods to MicroPython """ import math import time from micropython import const import spi_device #pylint: disable=bad-whitespace # Register and other constant values: _MAX31865_CONFIG_REG = const(0x00) _MAX31865_CONFIG_BIAS = const(0x80) _MAX31865_CONFIG_MODEAUTO = const(0x40) _MAX31865_CONFIG_MODEOFF = const(0x00) _MAX31865_CONFIG_1SHOT = const(0x20) _MAX31865_CONFIG_3WIRE = const(0x10) _MAX31865_CONFIG_24WIRE = const(0x00) _MAX31865_CONFIG_FAULTSTAT = const(0x02) _MAX31865_CONFIG_FILT50HZ = const(0x01) _MAX31865_CONFIG_FILT60HZ = const(0x00) _MAX31865_RTDMSB_REG = const(0x01) _MAX31865_RTDLSB_REG = const(0x02) _MAX31865_HFAULTMSB_REG = const(0x03) _MAX31865_HFAULTLSB_REG = const(0x04) _MAX31865_LFAULTMSB_REG = const(0x05) _MAX31865_LFAULTLSB_REG = const(0x06) _MAX31865_FAULTSTAT_REG = const(0x07) _MAX31865_FAULT_HIGHTHRESH = const(0x80) _MAX31865_FAULT_LOWTHRESH = const(0x40) _MAX31865_FAULT_REFINLOW = const(0x20) _MAX31865_FAULT_REFINHIGH = const(0x10) _MAX31865_FAULT_RTDINLOW = const(0x08) _MAX31865_FAULT_OVUV = const(0x04) _RTD_A = 3.9083e-3 _RTD_B = -5.775e-7 #pylint: enable=bad-whitespace class MAX31865: """Driver for the MAX31865 thermocouple amplifier.""" def __init__(self, spi, cs, *, rtd_nominal=100, ref_resistor=430.0, wires=2): self.rtd_nominal = rtd_nominal self.ref_resistor = ref_resistor self._device = spi_device.SPIDevice(spi, cs) # Set wire config register based on the number of wires specified. if wires not in (2, 3, 4): raise ValueError('Wires must be a value of 2, 3, or 4!') config = self._read_u8(_MAX31865_CONFIG_REG) if wires == 3: config |= _MAX31865_CONFIG_3WIRE else: # 2 or 4 wire config &= ~_MAX31865_CONFIG_3WIRE self._write_u8(_MAX31865_CONFIG_REG, config) # Default to no bias and no auto conversion. self.set_bias(False) self.set_auto_convert(False) def _read_u8(self, address): # Read an 8-bit unsigned value from the specified 8-bit address. buf = [] with self._device as device: device.write(bytes([address & 0x7F])) buf = device.read(1) return buf[0] def _read_u16(self, address): # Read a 16-bit BE unsigned value from the specified 8-bit address. buf = [] with self._device as device: device.write(bytes([address & 0x7F])) buf = device.read(2) return (buf[0] << 8) | buf[1] def _write_u8(self, address, val): # Write an 8-bit unsigned value to the specified 8-bit address. with self._device as device: buf = bytearray(2) buf[0] = (address | 0x80) & 0xFF buf[1] = val & 0xFF device.write(buf) @property def bias(self): """Get and set the boolean state of the sensor's bias (True/False).""" return bool(self._read_u8(_MAX31865_CONFIG_REG) & _MAX31865_CONFIG_BIAS) def set_bias(self, val): config = self._read_u8(_MAX31865_CONFIG_REG) if val: config |= _MAX31865_CONFIG_BIAS # Enable bias. else: config &= ~_MAX31865_CONFIG_BIAS # Disable bias. self._write_u8(_MAX31865_CONFIG_REG, config) @property def auto_convert(self): """Get and set the boolean state of the sensor's automatic conversion mode (True/False). """ return bool(self._read_u8(_MAX31865_CONFIG_REG) & _MAX31865_CONFIG_MODEAUTO) def set_auto_convert(self, val): config = self._read_u8(_MAX31865_CONFIG_REG) if val: config |= _MAX31865_CONFIG_MODEAUTO # Enable auto convert. else: config &= ~_MAX31865_CONFIG_MODEAUTO # Disable auto convert. self._write_u8(_MAX31865_CONFIG_REG, config) @property def fault(self): """Get the fault state of the sensor. Use `clear_faults` to clear the fault state. Returns a 6-tuple of boolean values which indicate if any faults are present: - HIGHTHRESH - LOWTHRESH - REFINLOW - REFINHIGH - RTDINLOW - OVUV """ faults = self._read_u8(_MAX31865_FAULTSTAT_REG) #pylint: disable=bad-whitespace highthresh = bool(faults & _MAX31865_FAULT_HIGHTHRESH) lowthresh = bool(faults & _MAX31865_FAULT_LOWTHRESH) refinlow = bool(faults & _MAX31865_FAULT_REFINLOW) refinhigh = bool(faults & _MAX31865_FAULT_REFINHIGH) rtdinlow = bool(faults & _MAX31865_FAULT_RTDINLOW) ovuv = bool(faults & _MAX31865_FAULT_OVUV) #pylint: enable=bad-whitespace return (highthresh, lowthresh, refinlow, refinhigh, rtdinlow, ovuv) def clear_faults(self): """Clear any fault state previously detected by the sensor.""" config = self._read_u8(_MAX31865_CONFIG_REG) config &= ~0x2C config |= _MAX31865_CONFIG_FAULTSTAT self._write_u8(_MAX31865_CONFIG_REG, config) def read_rtd(self): """Perform a raw reading of the thermocouple and return its 15-bit value. You'll need to manually convert this to temperature using the nominal value of the resistance-to-digital conversion and some math. If you just want temperature use the temperature property instead. """ self.clear_faults() self.set_bias(True) time.sleep(0.01) config = self._read_u8(_MAX31865_CONFIG_REG) config |= _MAX31865_CONFIG_1SHOT self._write_u8(_MAX31865_CONFIG_REG, config) time.sleep(0.065) rtd = self._read_u16(_MAX31865_RTDMSB_REG) # Remove fault bit. rtd >>= 1 return rtd @property def resistance(self): """Read the resistance of the RTD and return its value in Ohms.""" resistance = self.read_rtd() resistance /= 32768 resistance *= self.ref_resistor return resistance @property def temperature(self): """Read the temperature of the sensor and return its value in degrees Celsius. """ # This math originates from: # http://www.analog.com/media/en/technical-documentation/application-notes/AN709_0.pdf # To match the naming from the app note we tell lint to ignore the Z1-4 # naming. # pylint: disable=invalid-name raw_reading = self.resistance Z1 = -_RTD_A Z2 = _RTD_A * _RTD_A - (4 * _RTD_B) Z3 = (4 * _RTD_B) / self.rtd_nominal Z4 = 2 * _RTD_B temp = Z2 + (Z3 * raw_reading) temp = (math.sqrt(temp) + Z1) / Z4 if temp >= 0: return temp # Have to normalize to 100 ohms if temperure is less than 0C for the following math to work raw_reading /= self.rtd_nominal raw_reading *= 100 rpoly = raw_reading temp = -242.02 temp += 2.2228 * rpoly rpoly *= raw_reading # square temp += 2.5859e-3 * rpoly rpoly *= raw_reading # ^3 temp -= 4.8260e-6 * rpoly rpoly *= raw_reading # ^4 temp -= 2.8183e-8 * rpoly rpoly *= raw_reading # ^5 temp += 1.5243e-10 * rpoly return temp |
spi_device.py
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 |
# The MIT License (MIT) # # Copyright (c) 2016 Scott Shawcroft for Adafruit Industries # # Permission is hereby granted, free of charge, to any person obtaining a copy # of this software and associated documentation files (the "Software"), to deal # in the Software without restriction, including without limitation the rights # to use, copy, modify, merge, publish, distribute, sublicense, and/or sell # copies of the Software, and to permit persons to whom the Software is # furnished to do so, subject to the following conditions: # # The above copyright notice and this permission notice shall be included in # all copies or substantial portions of the Software. # # THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR # IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, # FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE # AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER # LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, # OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN # THE SOFTWARE. # pylint: disable=too-few-public-methods """ SPI Bus Device ==================================================== """ class SPIDevice: """ Represents a single SPI device and manages locking the bus and the device address. :param ~busio.SPI spi: The SPI bus the device is on :param ~digitalio.DigitalInOut chip_select: The chip select pin object that implements the DigitalInOut API. :param int extra_clocks: The minimum number of clock cycles to cycle the bus after CS is high. (Used for SD cards.) .. note:: This class is **NOT** built into CircuitPython. See :ref:`here for install instructions <bus_device_installation>`. Example: .. code-block:: python import busio import digitalio from board import * from adafruit_bus_device.spi_device import SPIDevice with busio.SPI(SCK, MOSI, MISO) as spi_bus: cs = digitalio.DigitalInOut(D10) device = SPIDevice(spi_bus, cs) bytes_read = bytearray(4) # The object assigned to spi in the with statements below # is the original spi_bus object. We are using the busio.SPI # operations busio.SPI.readinto() and busio.SPI.write(). with device as spi: spi.readinto(bytes_read) # A second transaction with device as spi: spi.write(bytes_read) """ def __init__(self, spi, chip_select, *, baudrate=100000, polarity=0, phase=0, extra_clocks=0): self.spi = spi self.baudrate = baudrate self.polarity = polarity self.phase = phase self.extra_clocks = extra_clocks self.chip_select = chip_select def __enter__(self): ## Locking has been disabled (for now) as MicroPython SPI object does not support it # while not self.spi.try_lock(): # pass # self.spi.configure(baudrate=self.baudrate, polarity=self.polarity, phase=self.phase) self.chip_select.value(0) return self.spi def __exit__(self, *exc): self.chip_select.value(1) if self.extra_clocks > 0: buf = bytearray(1) buf[0] = 0xff clocks = self.extra_clocks // 8 if self.extra_clocks % 8 != 0: clocks += 1 for _ in range(clocks): self.spi.write(buf) ## Locking has been disabled (for now) as MicroPython SPI object does not support it # self.spi.unlock() return False |